(found through ImmersiveTechBlog)
Building upon the concept of the Gravity Grabber, the Tachi Lab has created the Ghost Glove :
[youtube]http://www.youtube.com/watch?v=2QhWkYqT82s[/youtube]Here’s the video explaining the Gravity Grabber [article in pdf], which I have tested and works quite well !
From this article at BBC News :
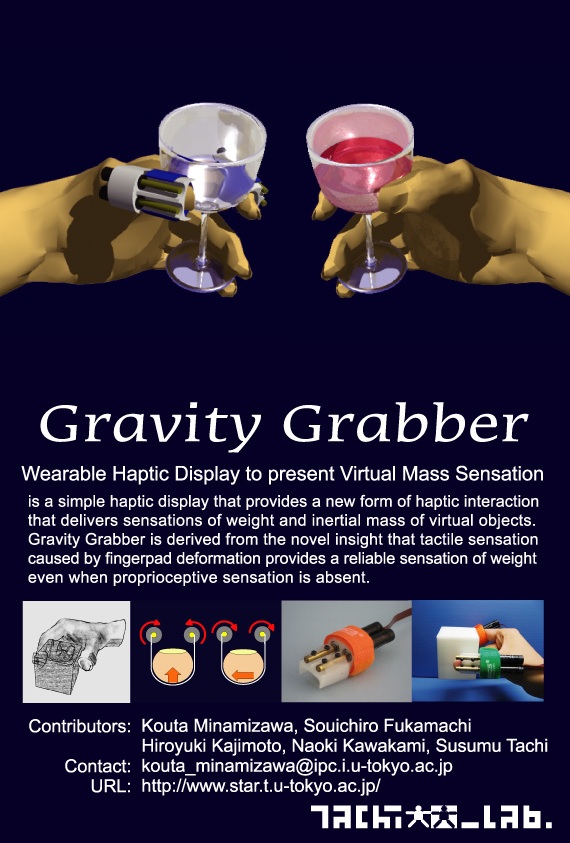
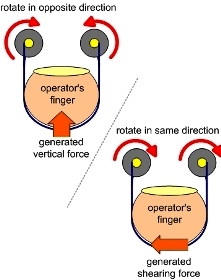
This system makes use of the discovery that squashing and rolling the sensitive pads on the ends of a person’s index finger and thumb can give a realistic impression of weight.
Post-graduate student Kouta Minamizawa and colleagues, from the Information Physics and Computing department at the University of Tokyo, aimed to exploit this using a lightweight, wearable ring fitted with tiny motors that pull on a narrow band of cloth.
Those using this system slip these rings onto their index finger and thumb with the band stretched across the tip of the digit. They get a sense of the weight of virtual objects when the tiny motors pull the band tight around the pad of the finger or slip the band from side-to-side.
The system can be used to represent single bulky objects like bottles when they are empty or have a liquid sloshing around inside them. It can even give the impression of several separate objects rattling round inside virtual containers.
Mr Minamizawa said it could be used in games to give players a more realistic sense of what their character was holding or doing.

This is a really interesting solution, especially if you can hold a physical object that has the same shape as the virtual object (passive haptics) to feel the forces applied to this object.
The limitation is that if you don’t hold any real object, there won’t be anything to prevent your fingers or hand from penetrating the virtual object. Only the Immersion CyberGrasp can do this completely for the moment.

It is a cool prototype although there would be some drawbacks as what you have said at the last paragraph.
I want to make a DIY. Any suggestions ?